

硬氪获悉,「忆生科技」(TranscEngram)完成数亿元天使轮融资,本轮投资方阵容横跨产业资本与国资平台,包括正大旗下中生制药、浦东创投、张江高科、弘信电子、云晖资本、沃肯资本、金舵资本等。
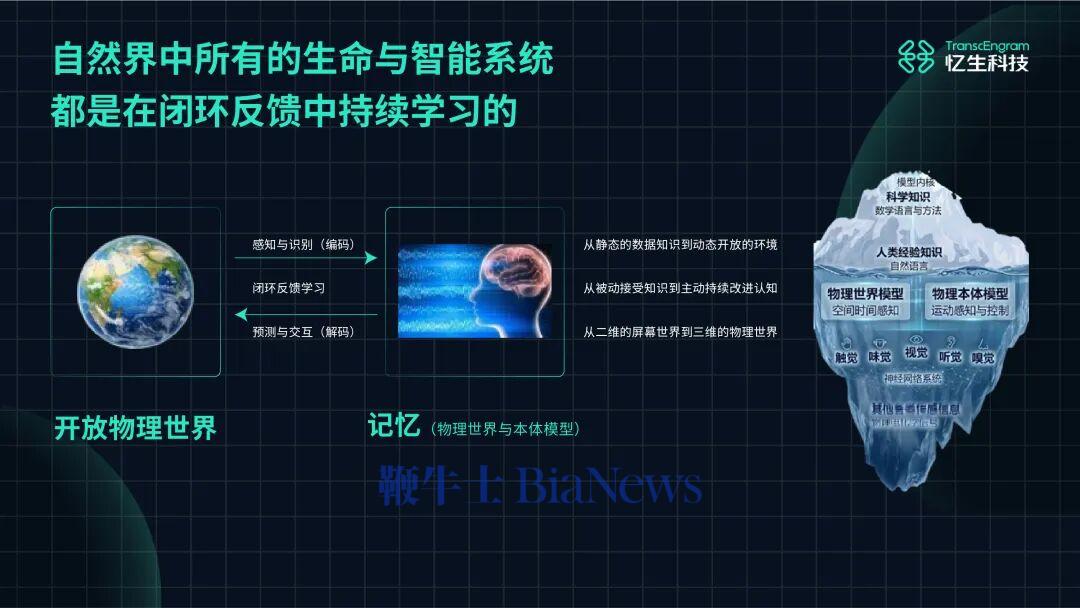
「忆生科技」致力于从科学第一性原理出发,用"感知—预测—交互"闭环构建机器人"大脑+小脑"统一系统,探索下一代可解释自主智能(Autonomous Intelligence)。
本轮融资资金将主要用于可解释具身控制大模型与物理世界模型的研发、多模态全人形动作交互数据和算法训练管线的建设、顶尖人才团队的扩充,以及深圳前海和上海张江研发中心与产业化基地的建设,加速推动可自我纠错、持续进化的具身智能大脑与小脑系统走向商业化应用。
「忆生科技」(TranscEngram)由全球顶级人工智能专家、香港大学计算与数据科学学院创始院长马毅教授与高盛华教授和杨言超教授一起于2023年9月创立。马毅是计算机视觉领域最高荣誉「马尔奖(David Marr Prize)」得主,也是IEEE、ACM、SIAM三料Fellow,拥有二十余年视觉感知与智能系统的理论积淀。并与邵逸夫奖得主Emmanuel Candes 以及图灵奖得主Yann LeCun等全球顶尖学者长期保持深度合作,共同探索下一代人工智能形态。
在马毅教授看来,当前大模型本质上是拥有庞大静态知识的“百科全书”。它们在封闭世界中完成开环训练,由于缺乏物理世界的自我验证与纠错机制,导致“知其然不知其所以然”,进而产生幻觉。真正的智能不应止步于此。
他认为,「忆生科技」推动机器人迈向 AI 2.0 时代的核心逻辑在于:要像生命一样,在“感知—预测—交互”的闭环反馈中学习。以人类为例,眼、脑、手早已实现高度协调统一——视觉获取记忆用于预测,双手通过交互完成任务。
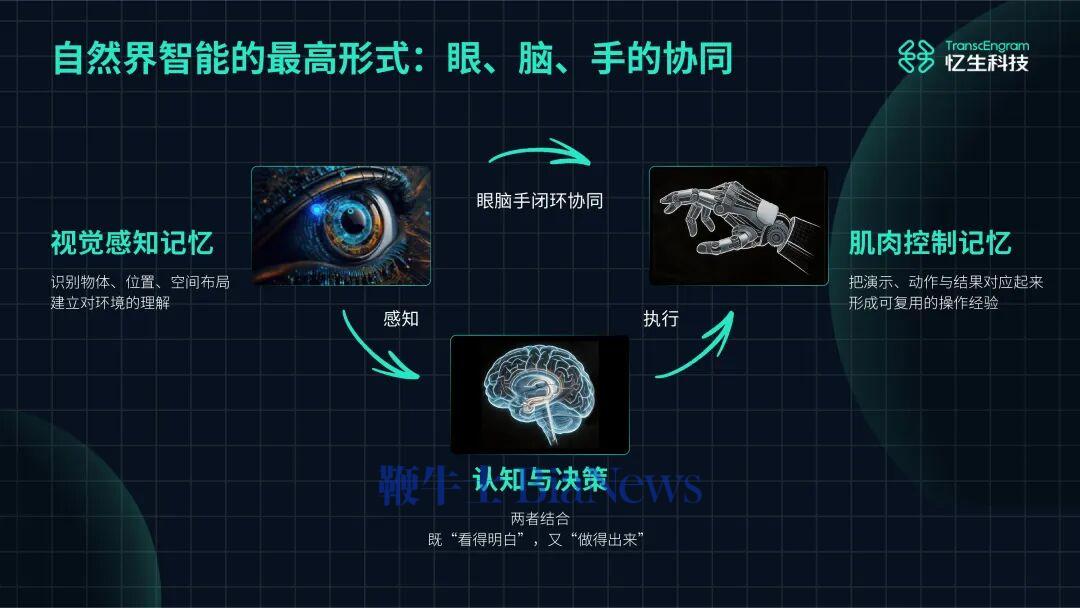
为此,忆生科技构建了“大脑+小脑”的统一架构,赋予机器人同样的闭环能力:
大脑的“视觉记忆”:模仿人眼,获取并理解外部环境的物理模型(空间与几何关系),进行复杂推理;
小脑的“肌肉记忆”:模仿人手,通过运动控制获取并改善本体模型,生成高频、稳定的运动控制策略。
这一架构彻底突破了静态知识在动态环境中的“不自知”局限。「忆生科技」联合创始人杨言超介绍,依托白盒可解释的网络结构,机器人能从海量数据中自动提炼交互概念,摒弃了对人工打标和固定任务列表的依赖,实现自我演进与增量学习。
在实际效能上,该架构展现了显著的代际优势——相较传统VLA模型,忆生科技基于记忆的生成式小脑架构在多任务平均表现上提升3倍以上,且能用单一模型高质量完成多项任务,成功率超95%。
更重要的是,其核心记忆机制并不与机器人本体强耦合,能捕捉任务背后的物理与语义结构,实现跨本体(如夹爪、灵巧手、不同臂展)的技能迁移。
这正是突破产业瓶颈的关键。过去,传统机器人依赖固定编程,一旦场景或工具变化,就必须重新调参、重训。而「忆生科技」通过记忆机制承载了任务背后的空间与时间结构,让机器人完成“看—记—做—学”的闭环,从而摆脱了对海量标注数据的依赖,真正具备了举一反三的泛化能力。
杨言超表示,在面对陌生设备或新任务时,机器人通过观察人类演示即可索引相关技能、生成执行策略,而完成所演示的任务。这不仅极大降低了部署成本,也让机器人具备了应对真实世界无限任务的进化潜力。
在商业化层面,「忆生科技」不局限于模型交付,而是搭建了覆盖全链路的四大产品矩阵:
1、EngramTeleOp智能真机遥操数据采集系统:
人机合一:采用先进的"生成式小脑"规律映射,代替死记硬背的点对点标定,延迟控制在10ms以内,实现"如影随形"的丝滑操控,保证采集数据干净平滑。
跨本体与跨地域:操作员只需5分钟部署即可上手教机器人,支持一人驾驭多种结构不同的本体。同时支持千公里公网超低延迟遥操(如上海跨地域实时遥控深圳真机)。
2、EngramEgo执行者视角运动数据采集系统:
该系统基于执行者第一视角,通过低成本轻量化穿戴设备,在非实验室真实场景中高效获取包含重心转移、躯干借力等隐性常识的高质量全人形姿态数据,扩展到真实物理世界的每一个场景。
3、EngramControl智能运动记忆控制系统:
将采集和演示数据提炼为可复用的”动作规律记忆",减少重复编程,使机器人具备"观察一遍即可学会"的零样本泛化潜力。
4、EngramNav环境记忆与导航系统:
赋予机器人记住环境物体、位置与空间布局的能力,支持大尺度非结构化越障与精准空间移动。
目前,忆生科技正重点推进两大应用路径——
高端酒店服务场景:切入高数字化、长工时的标准化环节,覆盖制卡、洗衣房洗叠、衣物配送、客房整理等服务闭环;
高端制造柔性装配场景:深耕航空航天等领域,解决传统产线换型难的痛点,提升质量控制与协作效率。
「忆生科技」已在上海、深圳、北京、四川布局研发与数据中心,并与智元、傅立叶、银河通用等头部机器人企业完成适配合作。
马毅教授表示,具身智能正从“热闹”向“扎实”转型,忆生科技将以基础原理创新与真实数据闭环为双轮驱动,为物理世界自主智能时代提供坚实、可信赖的通用技术底座。
以下是硬氪对「忆生科技」联合创始人杨言超、石志儒的采访节选:
硬氪:你们的记忆系统大概由哪些部分构成?
杨言超:我们定义的记忆系统包括两部分:视觉记忆和肌肉记忆。视觉记忆是关于空间的记忆,刻画环境中的几何与物理结构;肌肉记忆是关于时间的记忆,刻画交互中的轨迹与时序结构。
硬氪:这套记忆系统在真实场景验证了吗?效果怎么样?
杨言超:我们已经在实际场景中进行验证,模型的规模化和产品化也是我们正在推进的事情。从效果上看,基于记忆的生成式小脑架构,相比目前的VLA架构,在多任务学习场景下有明显优势,在多任务平均表现上,相比现有VLA模型有3倍以上提升;例如一个模型同时处理咖啡制作、叠衣、沏茶等任务时,可以不更换模型,并达到95%以上的成功率。
硬氪:你们的世界模型为什么强调"基于记忆"?它和别人的世界模型有什么不同?
杨言超:目前世界模型的版本很多,如果只做三维重建或视频生成,往往缺少记忆和持续学习能力。我们的不同之处在于,我们强调世界模型必须建立在记忆机制之上:有记忆,才能积累经验;能预测,才能理解交互后果;能持续学习,才能不断适应变化的环境和任务。
我们专注的是物理世界交互,所以不会在像素级别做过度建模,而是在基于记忆的层面做世界模型,让机器人能够理解环境、记住经验、预测结果,并持续学习新任务。
硬氪:你们这套记忆系统未来只能用在机器人上吗?
杨言超:不是。这套基于记忆的世界模型可以用在任何自主学习系统上,包括机器狗、其他需要与物理世界交互的自主系统。只要系统需要感知环境、积累经验、预测结果并持续改进,我们的记忆系统和世界模型就有应用空间。
硬氪:你们现在比较明确的商业化场景是什么?商业化进展怎么样?
石志儒:我们重点关注数字化程度较高、需要长时间工作、可以被机器人替代的人力场景。比如酒店整体服务:目前酒店仍需要人做清洁、前台服务和配送,配送环节已经有物流机器人在解决,但更完整的无人化自助酒店还在发展中,包括前台服务、洗衣房洗衣、物品递送、客房内轻量整理和清洁等。
酒店环境相对可控,适合智能体部署和验证,所以我们会从洗衣、叠衣、衣物配送、前台接待、制卡、基础客户服务这些场景入手,逐步打造自己的场景闭环。
我们也在探索工业生产中安全质量要求较高的场景,比如航空航天领域的飞行器制造。飞机、火箭、卫星制造通常有较好的数字化模型和"脉动工厂"等信息化系统,适合我们的大小脑解决方案落地。
这类场景不只是为了替代人力,更重要的是提升柔性生产和质量控制能力。当工具、步骤或场景发生变化时,传统编程式产线和协作机器臂往往需要重新部署,而我们希望用具身智能算法和记忆体,让机器人更快部署、更自然地与人协作。
硬氪:你们现在有哪些硬件合作伙伴和客户?
石志儒:我们的定位是通用具身智能底座与技能服务商,这决定了我们拥有极其开放和包容的生态合作圈。
由于我们自研了EngramMotorNeuron(跨本体控制转译引擎),能够将小脑所学习的能力进行跨异构本体的高效重定向。在深圳、北京等地,我们也已与银河通用、跨维智能等多家一线具身智能与运控上游企业,完成了“带记忆”的运动控制和灵巧操作适配,验证了我们跨异构本体技能迁移的通用性。
我们目前正与部分头部制造型企业开展深度的场景落地合作,例如拥有空客(Airbus)背景的飞机零部件制造商,共同探索在高端制造“脉动工厂”信息化系统下,将“大脑+小脑”方案嵌入到现有的协作机械臂和生产流程中,实现高柔性的敏捷装配。
除了上海总部和深圳研发基地外,我们在四川专门布局了一个前沿数据研发中心。四川中心的核心战略目标是聚焦灵巧手、触觉传感的高频力触觉反馈,重点攻坚精细化灵巧操作,并大规模开展灵巧手交互数据集的采集与自适应应用适配。这为我们未来全场景、长时序复合任务的“技能订阅(Skill Service)”源源不断地供给最顶尖的技能储备。
(来源:硬氪)
 扫码下载app 最新资讯实时掌握
扫码下载app 最新资讯实时掌握



