

“这个东西不能叫NAD(蔚来自动驾驶)。”
今年7月,蔚来CEO李斌在上海城区道路体验了自家最新的智驾功能,他略显失望。蔚来NAD类似于特斯拉的FSD(Full Self Driving),目标是实现城市和高速道路的点到点辅助驾驶。
年初,蔚来智能驾驶团队集结了一批人力,目标是上半年在上海数千公里城市道路实现领航辅助驾驶功能,但研发没有达到预期。据36氪PowerOn了解,蔚来智驾团队已经立下“军令状”,“每半个月更新一个版本。”
蔚来陷入焦虑,并非没有道理。一场比拼资源、人力、速度与规模的城市NoA(Navigate on Autopilot,领航辅助驾驶)之战,已经硝烟四起。
先是数字竞赛。华为、小鹏将今年城市NoA的开放目标分别定在了45城与50城,理想汽车则直接给出了100城的激进目标。
开城策略也针锋相对。小鹏汽车接连在理想总部所在地北京,推动城市NoA落地,而据PowerOn了解,理想则计划将城市NoA首个落地城市设定为广州——小鹏汽车大本营。
国内的城市NoA开城竞赛,甚至把压力传导给了特斯拉,后者正积极筹备全自动驾驶功能FSD入华落地。一位知情人士向PowerOn透露,这正是由特斯拉中国销售团队发起的申请,“希望美国总部尽快支持”。
汽车行业正从产品空间、价格、供应链等方面开展全面竞赛,但智能化尤其是智能驾驶,是新造车公司们最大的差异化竞争点。
这也迫使城市NoA成为行业为数不多的“一把手”项目。据PowerOn了解,理想100城的开城目标是由李想本人敲定;而小鹏智驾灵魂人物吴新宙离职后,何小鹏也在带领智驾团队开展工作。
但激进的宣传目标,无法掩盖城市NoA开城的艰难。截止目前,小鹏城市NGP的实际落地只推进到北京、上海、广州、深圳、佛山5个城市,华为的落地节奏相当,两者都还依赖高精地图;而理想和蔚来的城市NoA功能,尚未正式交付。
从高速到城市道路,城市NoA的落地仍面临重重困难,尤其在去掉高精地图后,城市NoA正面临一次感知危机,即如何重新认识眼前的世界。
#01
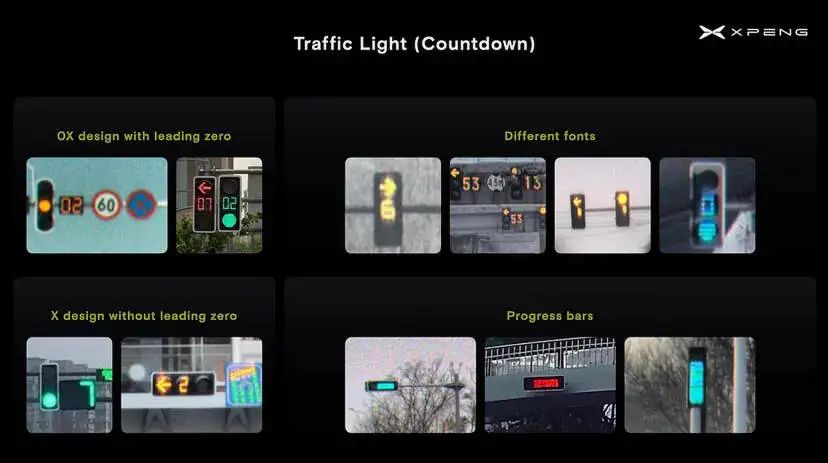
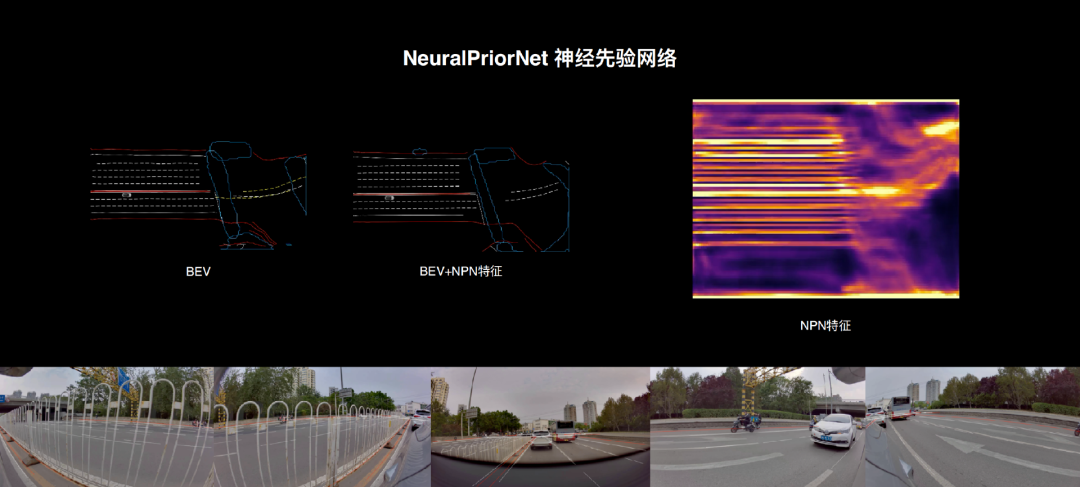
去掉高精地图的挑战,图源:小鹏汽车 特斯拉还是那个领头羊,其在2021年开始重建感知系统,先后推出了基于Transformer模型的BEV(即Bird's Eye View,鸟瞰图)和Occupancy network(占据栅格)等技术。 就像人用眼睛看世界一样,BEV能将2D图像转换成3D立体空间,此外,BEV+Transformer还能够识别静态车道线,提供车道线边缘,虚实车道线等信息;而动态层面,Occupancy网络则用以识别异型障碍物,如施工场景中的锥桶等。 “BEV这套方案的上限非常高,能让车辆像人类一样去看这个世界,基本是自动驾驶的终局方案。”有头部车企的高级工程师向PowerOn断言。 换句话说,在去掉高精地图之后,BEV+Transformer+Occupancy,为智驾系统生成了一幅实时地图。 BEV+Transformer的感知世界,图源:理想汽车 PowerOn从接近特斯拉工程团队的人士处获悉,基于新的感知方案,特斯拉FSD功能已经释放给上百万辆汽车,在无需高精地图的情况下,特斯拉FSD的百公里接管率已经低至1.6-1.7,“这是一个强调舒适性的标准。” 由此,特斯拉已经率先验证了BEV+Transformer+Occupancy“去图三件套”的可行性,国内的小鹏、华为、蔚来、理想等公司,也全部跟进。 不过,这套感知方案天花板虽然高,却不好驾驭,尤其是国内公司刚切入这条路线。以简单的车道线信息为例,原本借助高精地图,可以轻易获得,但用BEV+Transformer去实时感知,则是完全不同的境况。 比如,路口排队通行时,车道线经常被前方车辆遮挡,智驾系统如果跟着前车行驶,但走了一会儿发现其实没有车道线,就会出现摇摆。 “这会导致车辆行驶忽左忽右,体验很不好。”有工程师告诉PowerOn,智驾体验最直接的并不是感知,而是规划控制,“起码坐上车不会乱晃。” 同样,也可能因为光线太强,摄像头对车道线的感知不够清晰,又或者是路面施工造成的车道线遮挡……这些都可能让智能汽车在城市道路上“抓瞎”。 而相比识别被遮挡的车道线,识别红绿灯路口的难度更是直线拉升。 此前不管是特斯拉,还是国内的理想、蔚来和小鹏等,高阶智能驾驶都针对高速道路,红绿灯路口难免被忽视。而争相交付城市NoA的过程中,这些车企才发现,如何通过红绿灯路口是个两难问题。 理想汽车智驾副总裁郎咸鹏曾系统分享过:如果借助高精地图通过红绿灯路口,车辆对红绿灯识别和检测需要跟高精地图、高精定位做匹配,如果识别的红绿灯与高精地图匹配不上,就会感知失败; 而如果去掉高精地图,红绿灯类型又千变万化,位置摆放各异,如何只靠摄像头去准确识别,并且跟自车道相对应,同样艰难。 复杂的红绿灯案例,图源:小鹏汽车 一位小鹏汽车工程师向PowerOn直言,红绿灯确实不好做,“去年公司红绿灯团队被骂得很惨。” 识别被遮挡的车道、通过复杂的大型路口、认出形形色色的红绿灯等,都是智能驾驶开城必须攻克的难关。而对于想要加速超车的公司而言,似乎要找到一条快速路。 过往,理想汽车的智能驾驶进展,经常被当作“差班生”。虽然其高速NoA功能落地并不慢,但相较于蔚来和小鹏,理想的智驾投入的确保守,就在2022年,小鹏和蔚来的智驾团队均超过800人,而理想汽车仅维持在500人左右。 但今年开始,理想汽车忽然有了一举赶超的势头,团队快速扩张至800人左右,喊出无图版城市NoA“年内开通100城”的目标。激进转身引发了同行侧目,招致蔚来智驾产品负责人黄鑫的隔空质疑。 是什么让理想汽车有了从队尾大步走向队首的底气? 今年5月家庭科技日上,理想公布了城市NoA方案,除了行业标配的“去图三大件”:BEV+Transformer+Occupancy,理想还有两个“独门”神经网络:NPN(神经先验网络),针对车道线被遮挡和复杂路口等场景;TIN(信号灯通行意图网络),针对红绿灯路口。 人眼无法看懂的道路NPN特征,图源:理想汽车 理想的信号灯识别方案,图源:理想汽车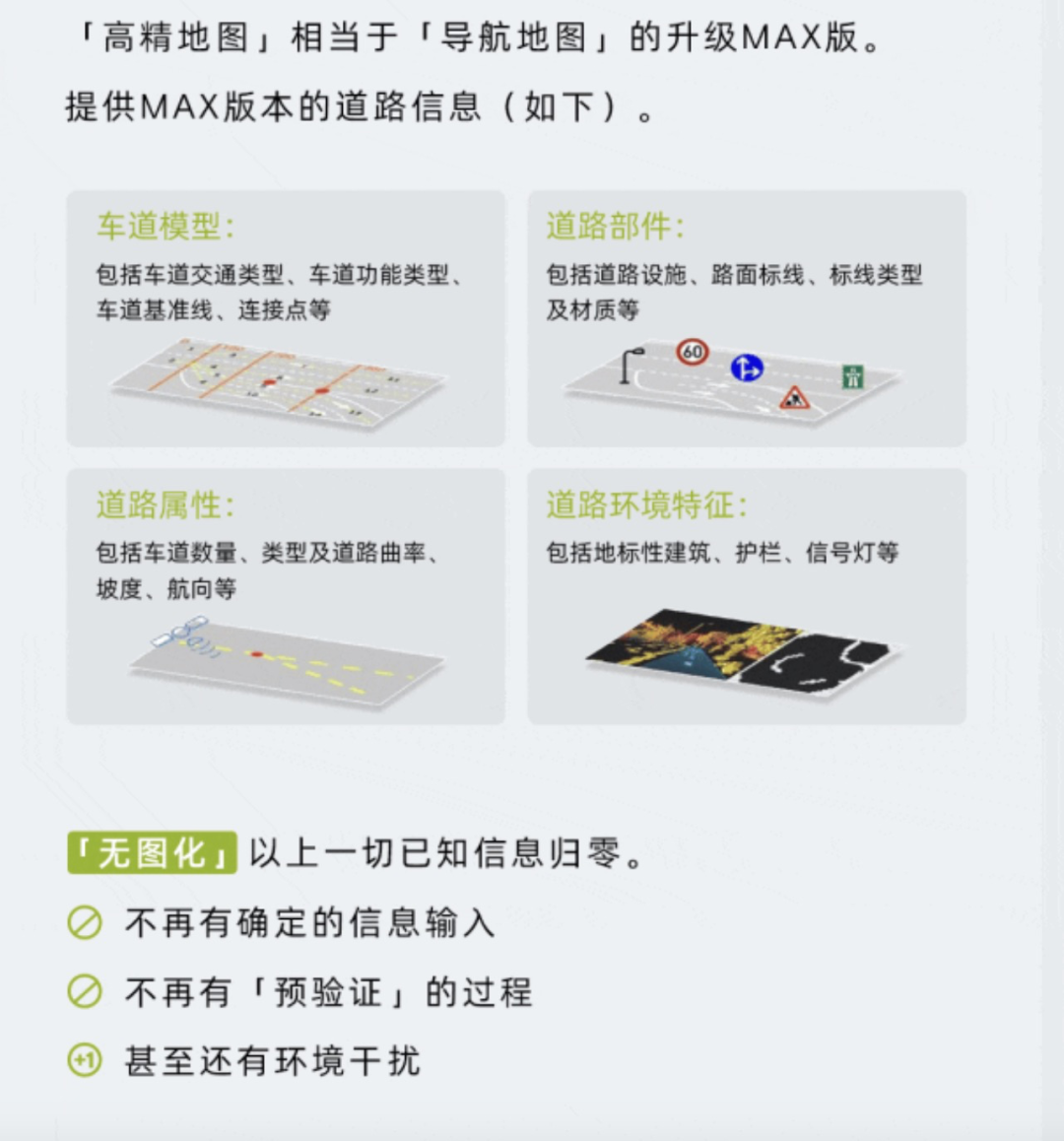


即便是给出了去图方案的特斯拉,也不是部署一个技术框架,就可以高枕无忧。算法模型的搭建完成,只是智能驾驶大厦的地基,往后则是不断的测试和优化。 甚至越是用到BEV+Transformer这样的端到端模型,越需要大量的参数调整和优化。接近特斯拉工程团队的人士告诉PowerOn,即便是特斯拉,“也需要加一定的restriction (加一些规则逻辑的代码)来进行辅助。” 此外,算法模型的每一次训练和优化,都是一个耗时耗资的大工程。 一位小鹏人士向PowerOn表示,通常为保证模型的效果,研发团队在前期会将模型做的很重,比如将感知精度推得很高。而算法优化,就是在保证感知精度不被降低的前提下,砍掉模型中无用的参数,并将算法塞进算力受限的计算平台,尽可能减少对算力的消耗,“剪枝、量化、软件部署,每一步都要做很多工作。” 而由于数据量庞大,每一次的算法训练都是一笔巨大消耗,从喂养数据到一个可用的模型,“一次训练要好几天,花费几百万元。” 除了一遍遍优化算法,还要在实际道路上进行无数次软件测试,这也是智驾落地过程中的最枯燥的“dirty work”。 有业内人士向PowerOn介绍了智驾落地的大致流程:针对目标城市,测试工程师们往往要拿整体方案进行路测,每天在车内坐上十来个小时,起码十数台车起码跑半个月以上,才能积累特殊路况。 然后通过修改算法解决特殊问题、迭代模型,但新的模型并不一定能顺利解决问题,“可能10个问题只解决了5个,只能不断去测,反复下来,一个城市的问题解决可能要三个月。” 随着落地规模越大,车企需要建立一个更加庞大的数据闭环系统,涵盖数据挖掘、主动学习、自动标注、模型调试、测试验证、模型发布等环节。最重要的是,数据闭环要能够经受数十万甚至百万车回传的数据冲刷,才能真正形成数据驱动,让车辆具备自主进化的能力。 因此,饶是落地经验相对丰富的小鹏汽车,开城速度也没有想象中快。“现在还没有成熟的流水线开城模式,只能是先翻一个山头,再翻一个山头。”一位小鹏汽车智驾人士说道。 有小鹏人士表示,现在内部压力最大的是规划控制环节。例如,小鹏之前的数据大部分是广东的,扩城之后,会遇到很多北京特有的场景。 如果要保证用户的体验一致,只能叠加各种控制规则来修改驾驶策略。小鹏智驾灵魂人物吴新宙,即便在离职前夜,也不得不为了北京的城市NGP落地,“北京广州来回跑。” 显然,即便是有了可行的感知技术路径,城区智驾也没有快速铺开的“银子弹”。不管是模型优化还是规则调整,都是漫长而繁琐的工程化过程。 8月25日的成都车展上,理想汽车副总裁刘杰悄然调整了“城市NoA开通100座”的描述,在其公布的开城明细中,将“城市NoA”改为了“通勤NoA”。 相比城市NoA对全城区域的覆盖,通勤NoA模式轻量很多,用户可以自行设定1到2条通勤路线,车辆自主学习道路NPN特征,学成之后就可以在这些通勤路线开通NoA功能。“相对简单的路线基本1周以内可以激活,较为复杂的路线,2-3周也足以完成训练。”理想表示。 小鹏也推出了类似的“AI代驾”模式,来实现今年50座的开城目标。“成本又低,边际效应很大,都是用户高频使用路线。”一位智驾行业人士表示。 BEV+Transformer几乎提供了去掉高精地图的终局感知方案,也让智能驾驶从高速走进城市,最终通往自动驾驶。但必须承认的是,代码与算法有限,而现实场景无限,这也决定,智能驾驶是一砖一瓦的量产工程。 在激烈的口水仗过后,国内的车企们依然需要回归现实,日拱一卒。(启动PowerOn)
 扫码下载app 最新资讯实时掌握
扫码下载app 最新资讯实时掌握



